产品列表PRODUCTS LIST
德国力士乐速度传感器R917002704基于霍尔效应的DSM1-10速度传感器是专门为在移动工作机器的恶劣条件下使用而开发的。传感器收集铁磁齿轮或冲片的速度信号。作为一个有源传感器,当它这样做时,它传递一个与速度无关的恒定幅度的信号。传感器之所以与众不同,不仅是因为它可以检测旋转方向,还因为它具有其他诊断功能,
更新时间:2023-08-22

德国力士乐速度传感器R917002704
特征
德国力士乐速度传感器R917002704
基于霍尔效应的DSM1-10速度传感器是专门为在移动工作机器的恶劣条件下使用而开发的。传感器收集铁磁齿轮或冲片的速度信号。作为一个有源传感器,当它这样做时,它传递一个与速度无关的恒定幅度的信号。传感器之所以与众不同,不仅是因为它可以检测旋转方向,还因为它具有其他诊断功能,例如:
静止检测
‐的
临界气隙
‐的
关键安装位置
‐的
由于其紧凑而坚固的设计,该传感器适合集成使用
在用于车轮速度采集的车轮轴承中
‐的
在变速器或齿轮级中
‐的
公共汽车、卡车和工程机械中的风扇驱动装置(7至20千瓦)
‐的
在压路机和摊铺机的振动驱动中
‐的
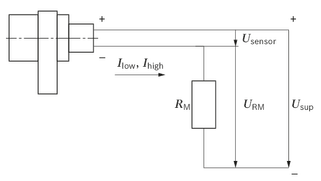
U传感器 | 传感器工作电压 |
U吃晚饭 | 电源电压 |
URM | 测量电阻处的信号电压 |
i低的,i高的 | 传感器电流 |
rM | 测量电阻器 |
双线电流接口用于信号传输。传感器提供电流信号。低电流(i低的=有源元件的自身电流)被解释为低信号。高电流(i高的=i低的+∏i;∏i=来自与有源元件平行的路径的附加电流)被解释为高电流。控制单元中在测量电阻处从传感器接收的电流rM被转换成电压信号。评估电路基于电压电平检测高信号还是低信号。
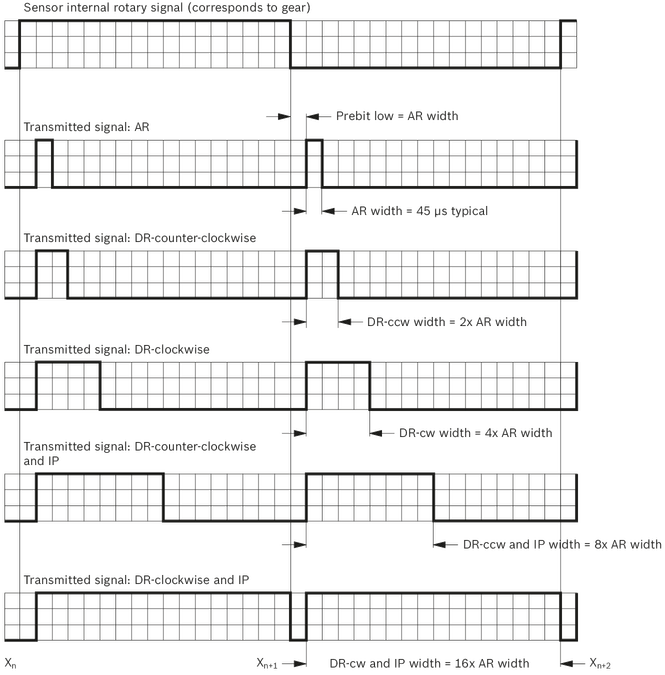
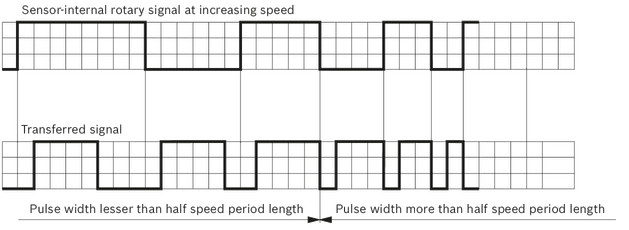
DSM1-10输出信号由DSM1-10评估电子设备产生的等幅方波信号组成。单个脉冲的长度提供了关于旋转方向和安装位置任何误差的信息。
评估电子器件在传感器内部速度信号的每个边沿之后产生一个限定长度的高脉冲,由此高脉冲的长度由要传输的信息限定。例如,左边的信息旋转方向由90秒长脉冲描述,右边的信息旋转方向由180秒长脉冲描述。
为了在高速下有长的高脉冲时仍然输出转速信息,低时间(前位低)总是在高脉冲之前插入。因此,尽管信号中的附加信息在较高的转速下丢失(脉冲被低时间特征截断),转速信息的可靠输出可能达到大频率(上游低时间+短高脉冲)。
如果输出气隙储备信号,则其他信号重叠(AR占优势),即既不输出旋转方向信号也不输出安装位置信号。
传感器对磁流的变化做出反应。如果齿轮和传感器之间的气隙过高,信号输出可能会受到不利影响:
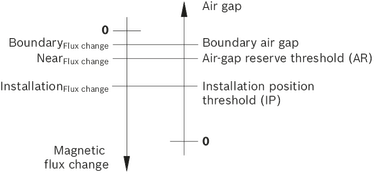
极限范围极限通量变化
小于极限通量变化对于磁流变化,可能会出现信号丢失。
近景近景通量变化
不到近通量变化对于磁流变化,输出AR位。
安装位置安装通量变化
小于安装通量变化对于磁流变化,输出IP位。
随着转速的增加,在输出计划长度的信号之前,会检测到车轮上的下一个表面。在这些情况下,信号会缩短,并且在每个边沿覆盖信号后会出现零时间(45 μs)。这确保了脉冲频率以及转速始终正确传输。转速信息的丢失并不重要,因为由于高转速,旋转方向在那个时间点不能改变。如果旋转速度降低(例如减速直到旋转方向改变),则信号再次*输出,并且旋转方向的改变被检测到。
没有检测到速度信号后的传感器信号
一秒钟内:
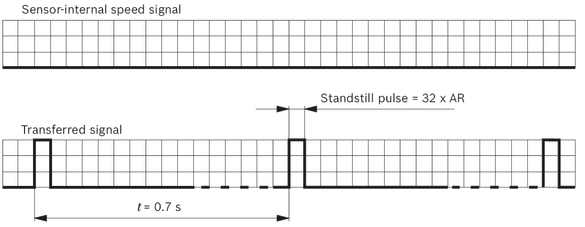
当车辆静止时,传感器每0.7秒输出1.44毫秒的脉冲。只要没有检测到速度信号,这些脉冲也会在欠压后输出。
初始化也在静止状态下进行。该初始化持续255到345秒。在此期间无法检测到信号变化。
退出静止和/或启动信号
当确定输出值(频率、旋转方向等)时。),可能需要一定数量的脉冲来确保提供适当的信息。
当从静止状态或欠压状态后启动时,传感器首先被设置为未校准状态(信号未偏移补偿)。同样在该阶段,传感器在第二信号脉冲开始时提供正确的频率信号,并且另外,在典型条件下,在第三信号脉冲时提供正确的旋转方向信号。旋转方向的正确输出多需要七个齿/边,具体取决于安装位置。在这种模式下,磁输入信号的小值和大值用作触发点。
在非校准模式下输出信号期间,传感器对信号进行校准(偏移补偿)。传感器然后自动切换到校准模式。从这一点开始,磁输入信号的过零点被用作触发点。切换到校准模式时,输出信号的相移(大值–90°和/或+90°)可能在极少数情况下发生。
在非校准模式下输出的信号脉冲数多为五个。
信号容差
以下持续时间(小值、标称值、大值)由传感器内部元件的公差决定,适用于各种情况:
脉冲名称 | 脉冲宽度t脉搏 | ||||
| 低限度 | 名义上的 | z高的 | ||
预调低 | tVorbit | μs | 37 | 45 | 53 |
气隙储备 | tAR | μs | 37 | 45 | 53 |
逆时针旋转方向 | t医生-《特定常规武器公约》 | μs | 74 | 90 | 106 |
顺时针旋转方向 | t灾难恢复连续波 | μs | 149 | 180 | 211 |
逆时针旋转方向和安装位置信号1) | t灾难恢复-特定常规武器公约/知识产权 | μs | 298 | 360 | 422 |
顺时针旋转方向和安装位置信号1) | t灾难恢复-连续波/知识产权 | μs | 597 | 720 | 843 |
停顿 停止 | t脉冲停止 | μs | 1194 | 1440 | 1685 |
静止检测 | t停止 | 女士 | 611 | 737 | 863 |
| 1) | 脉冲日间行车灯/日间行车灯和/或日间行车灯-连续行车灯/日间行车灯仅在信号频率约为1/2时输出。117赫兹。高于该频率,该脉冲随后被较短的灾难恢复常规武器和/或灾难恢复连续波取代。 |
振动
静止时编码器轮的振动会产生传感器错误信号。
DSM1-10可通过以下BODAS控制单元读取:RC系列21、22、30和31。
注意:
应考虑所用生化需氧量控制单元的当前数据表。
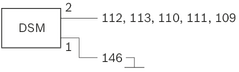
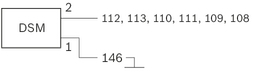
2个输入
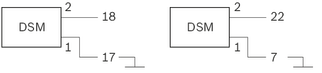
2个输入
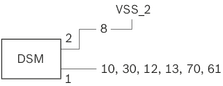
5个输入
6个输入
6个输入
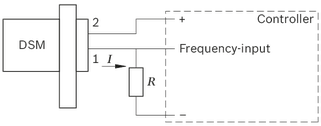
电流i以脉冲形式提供传感器信息(参见“输出信号”章节或详细信息),其低电平和高电平如下:
i | 低限度 | 名义上的 | z高的 | |
i低的 | 妈 | 5.9 | 7 | 8.4 |
i高的 | 妈 | 11.8 | 14 | 16.8 |
小脉冲宽度为52秒,相当于10千赫的频率。
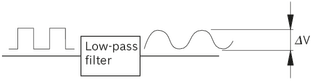
为了解释信号,必须确保在30千赫输入频率下,信号(在任何低通滤波器出现后)仍然具有足够的电压差(δv)用于评估。
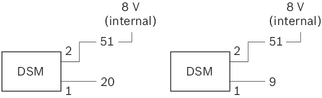
电阻器r产生出现在遥控控制单元频率输入端的电压。
例如r= 200ω时,读取以下电压:
U投入 (r= 200ω) | 低限度 | 名义上的 | z高的 | |
U低的 | V | 1.18 | 1.4 | 1.68 |
U高的 | V | 2.36 | 2.8 | 3.36 |
要安装的电阻器r必须这样选择:
控制单元内部信号评估的电压差足够了。
‐的
电阻器上的大电压r不会变得工具高(适用于传感器电源),因此传感器引脚处至少存在4.5 V电压。
‐的
如果满足这些条件,并且信号存在于控制单元内部,则可以确定传感器信息。
由于DSM的特性,即轮齿的两侧,车轮的实际速度差确定如下
f车轮=f阅读/ 2
为了确定这一信息,必须测量脉冲的长度。例如,这可以在控制单元中通过测量脉冲的开始和结束时间来完成。
然而,在没有这种评估的情况下,总是可以从频率中读取速度。然而,应始终考虑静止状态下的行为(每0.7秒1.44毫秒)。可以检测到脉冲过长(1.44毫秒)。
详情点击:力士乐速度传感器

 免费咨询:19961810949
免费咨询:19961810949 发邮件给我们:35371012@qq.com
发邮件给我们:35371012@qq.com 在线客服
在线客服